Chapter 14 Probabilistic Reasoning over Time
Chapter 14 Probabilistic Reasoning over Time
Time and Uncertainty
靜態假設
動態情況
- 血糖指數會動態改變
States and observations
time slice 以及符號定義
- 下雨天的例子
集合符號的定義
- 本單元假設time slice 是固定的長度 可以用整數表示
Transition and sensor models
Markov assumption
- 假設當前狀態只與 前k個有限數量的狀態有關
first oreder, second order Markov assumption => transition model
- 相當於條件機率
- 相當於條件機率
雖然是動態世界 但世界狀態改變的法則是固定的
- 機率是固定的 只是時間會變化
sensor model
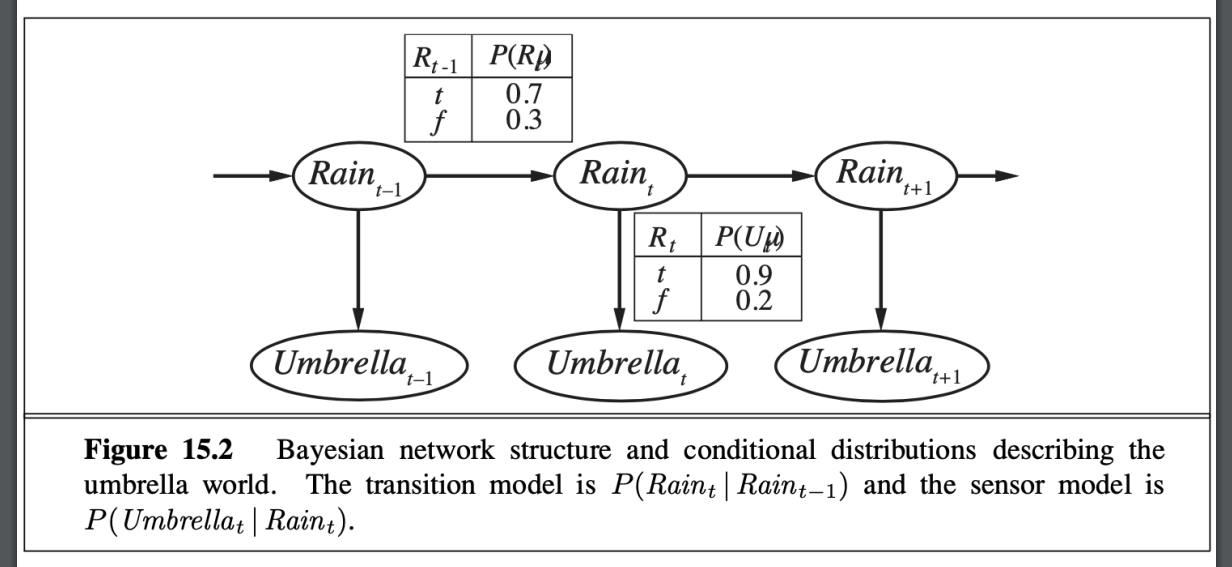
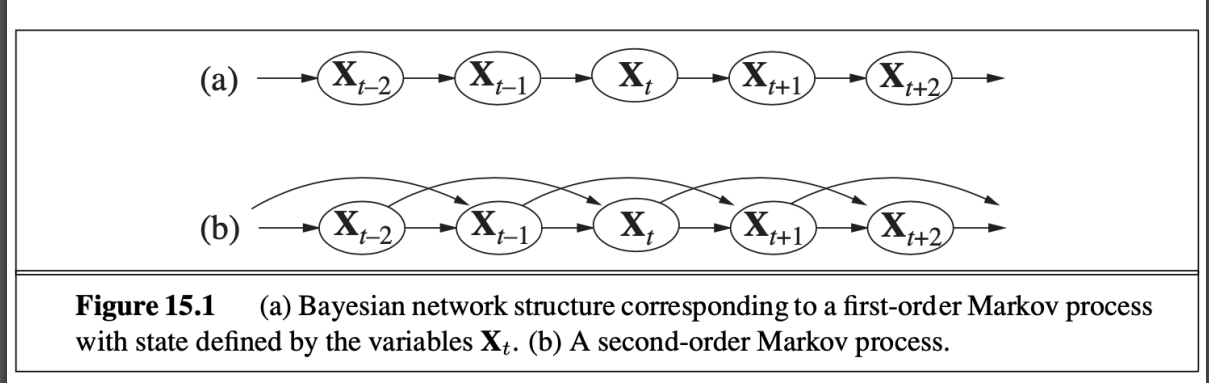
- 圖像化
整個形式
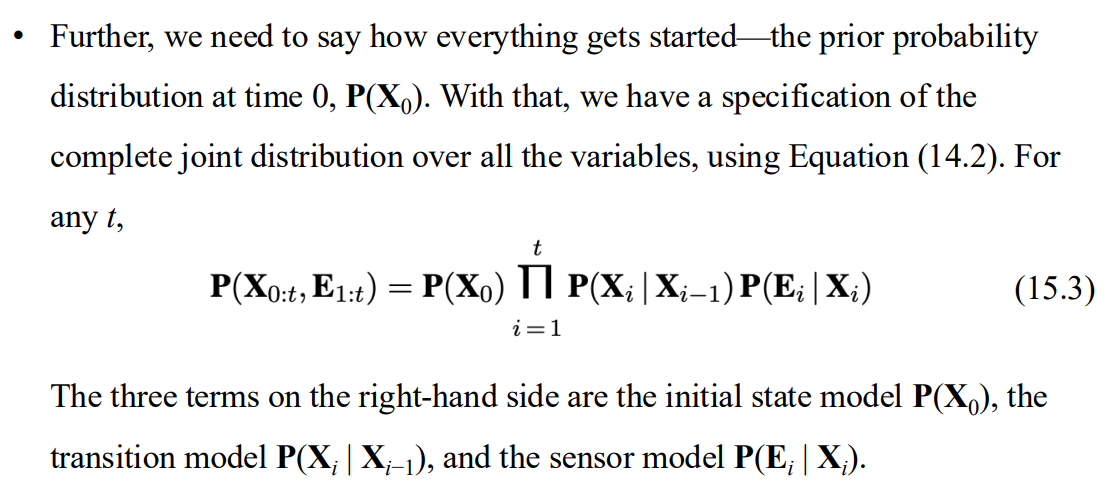
- initial state model
- transition model
- sensor model
假設正確與否 取決於該domain
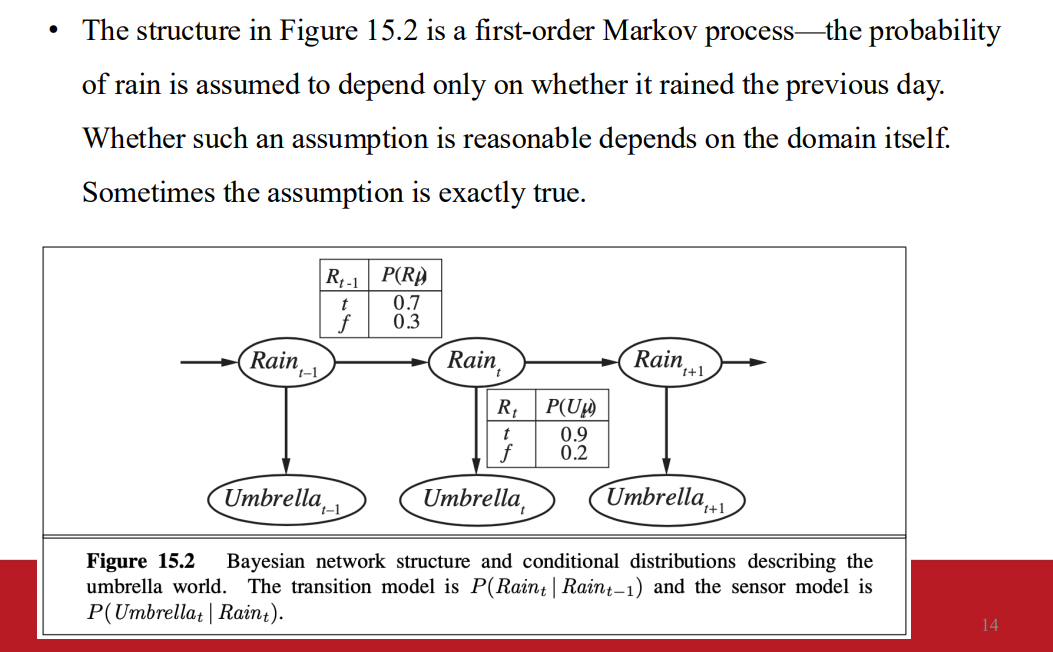
- 提高準確度的方法: 增加order 或是 添加更多變數
Inference in Temporal Models
濾波
- 以過去到現在的狀態 找出跟當前有關的資料 推論現在的狀態
預測
- 以過去到現在的資料 預測未來數個時間點的狀態
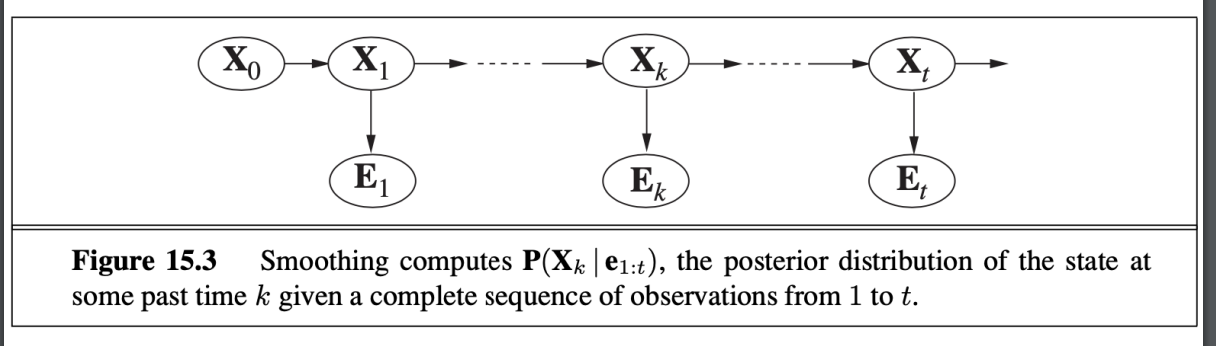
平滑
- 以過去到現在的資料 推論過去的狀態
最大可能解釋

- 找出一串環境狀態 能夠最大的去解釋 evidence
學習
- 使用 EM algorithm
Filtering and prediction
透過函數更新當前狀態 減少回去找歷史資料的情況
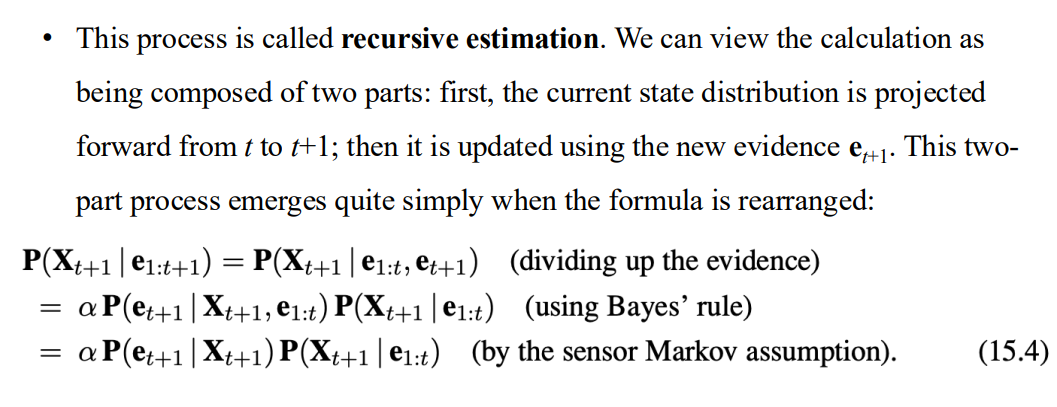
- 稱之為 recursive estimation
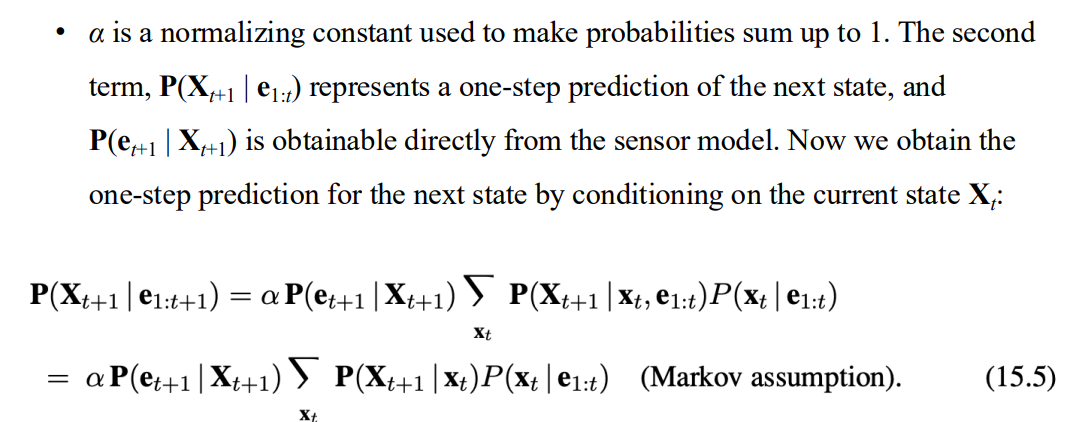
- 藉由 conditioning 現在的狀態 繼續拆開等式 => 藉由當前的狀態 預測下一個狀態的機率分布
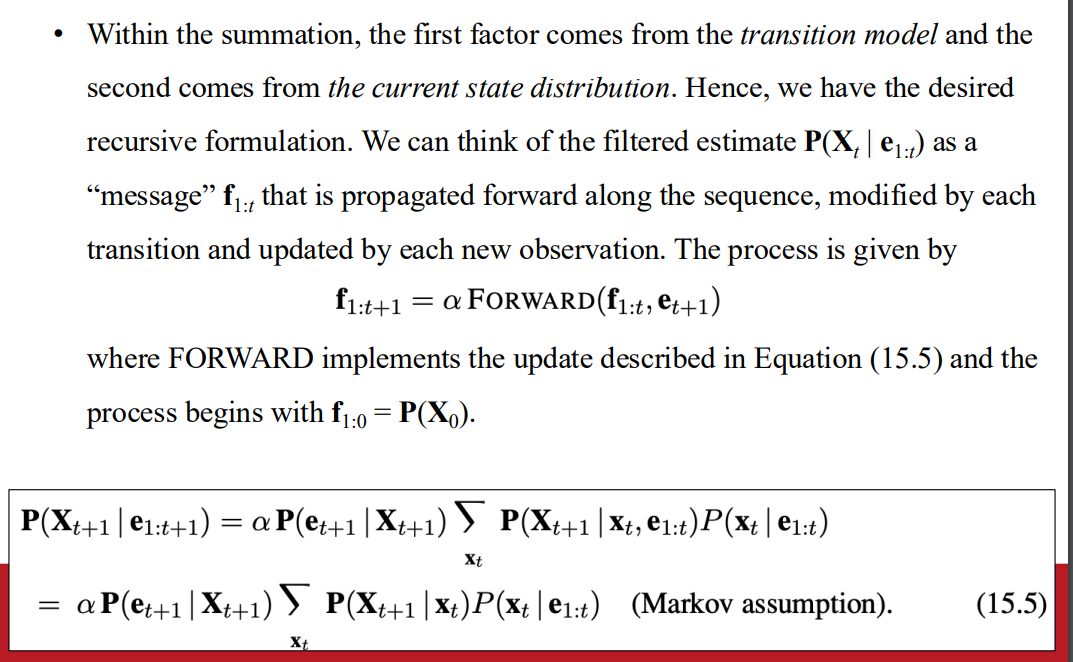
- 將機率寫成 message的形式
- 稱之為 recursive estimation
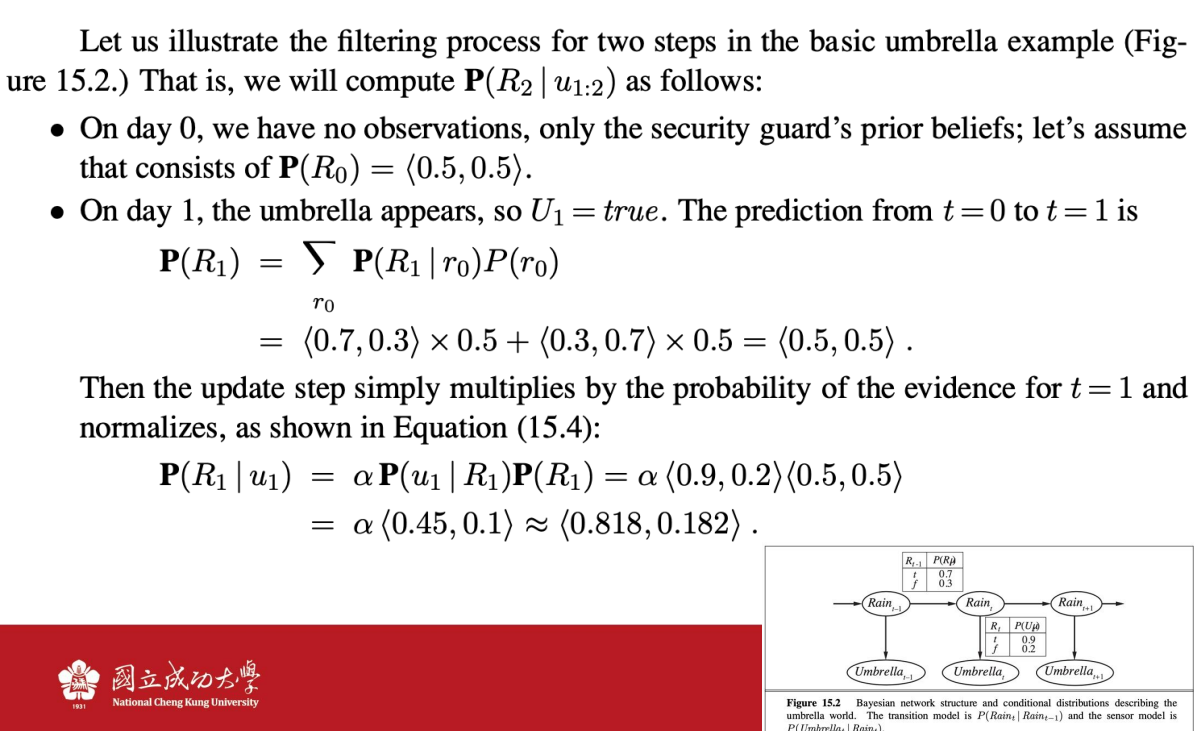
雨天的例子 預測兩天

Prediction
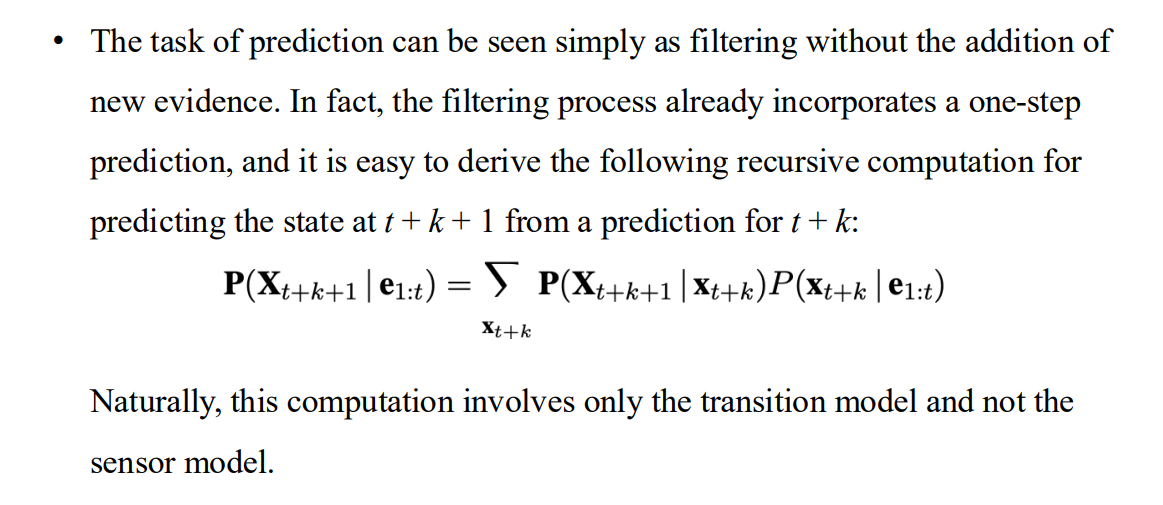
- 其實就是Filtering 延伸到+k
- 沒有證據版本的 => 所以只有 transition model
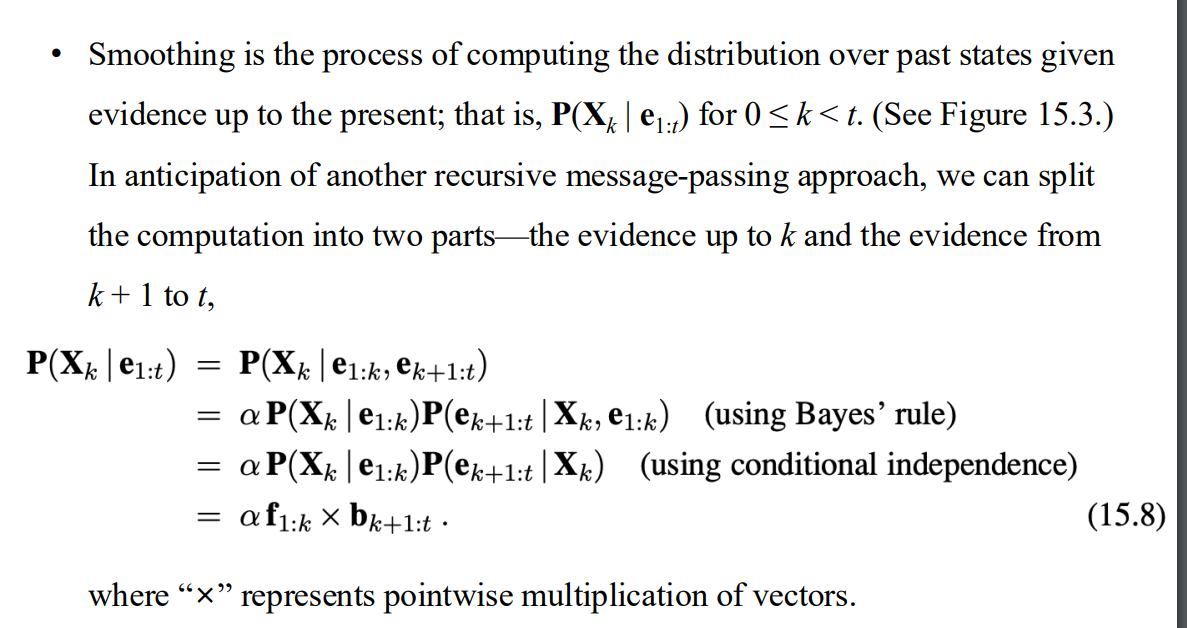
Smoothing
平滑的做法
backward message

- 反覆的transition 並藉由狀態預測evidence
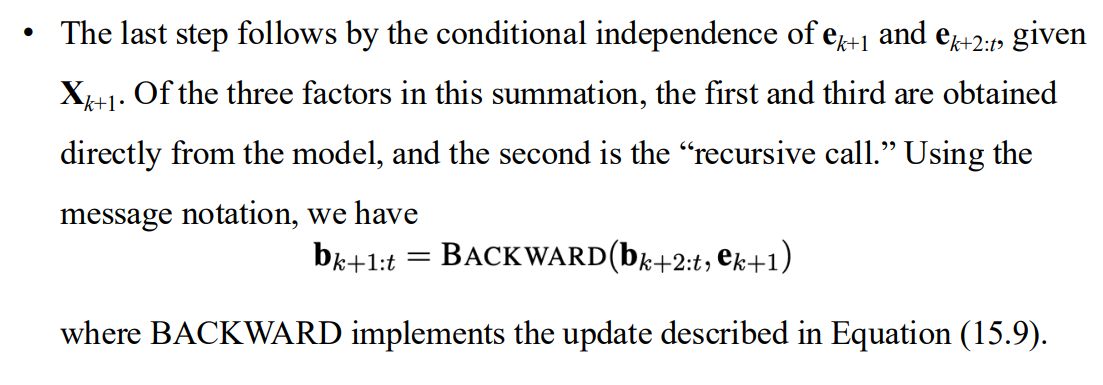
- 第一和第三個factor 都是model本身就有的
- 第二個factor 就是recursive call
- 反覆的transition 並藉由狀態預測evidence
故得知f, b都可以靠 recirsive求得
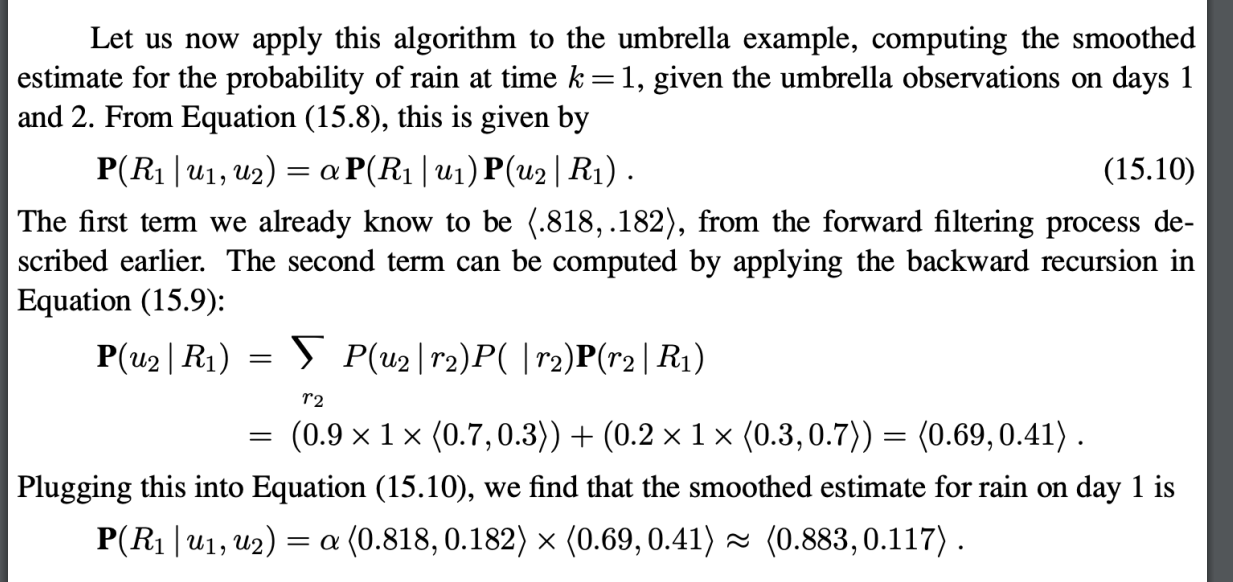
- 雨天計算的例子
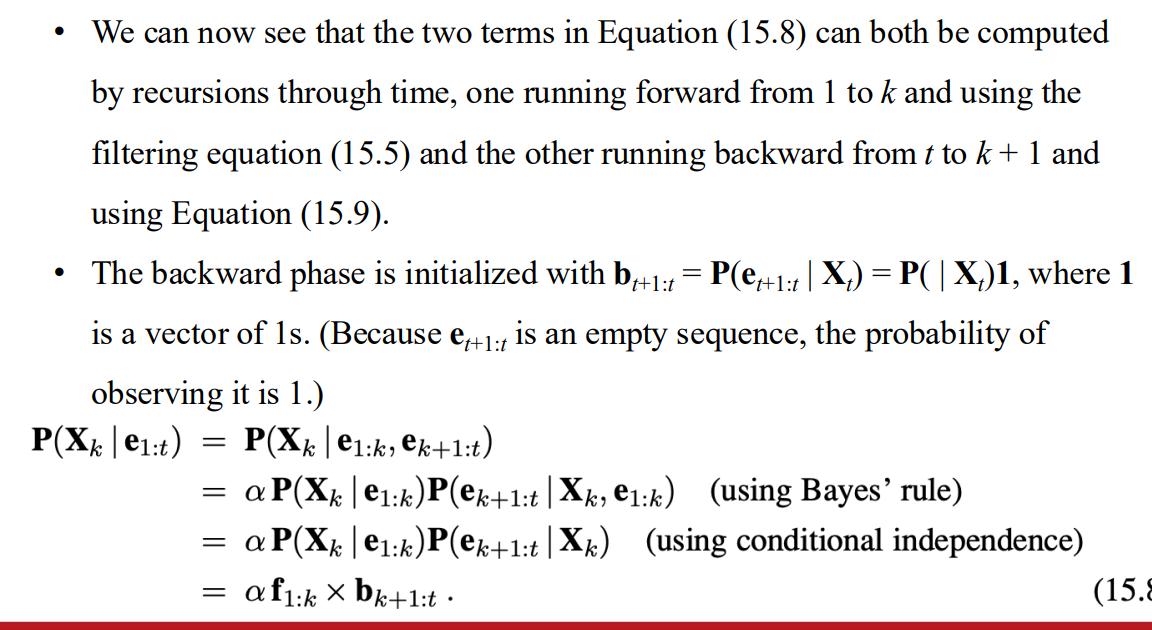
Smooth 的計算複雜度
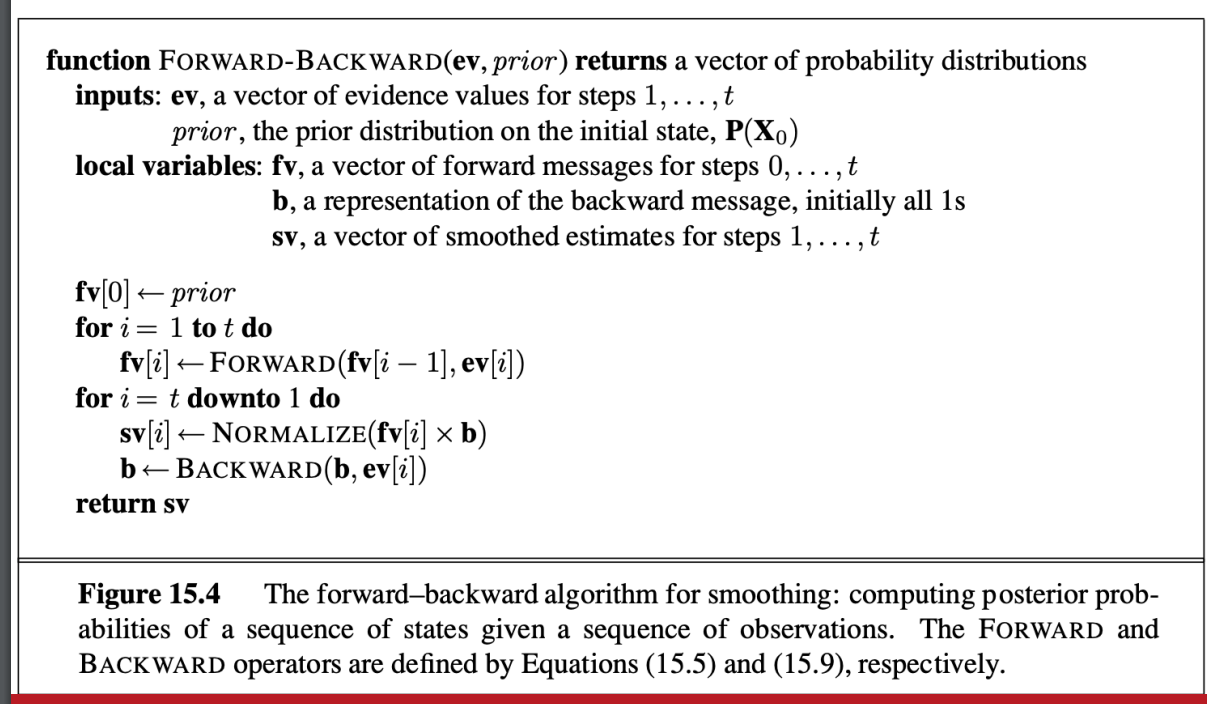
forward-backward algorithm
- forward 由前往後
- backward 由後往前
- 並用表紀錄計算出來的值 減少計算複雜度
Finding the most likely sequence
MLE
- 用smooth 去找出後驗機率分佈

- 像在走圖
- 選擇機率最高的 邊走邊smooth
- 用smooth 去找出後驗機率分佈
當前的最可能路徑 與過去最可能路徑 以及當下證據有關
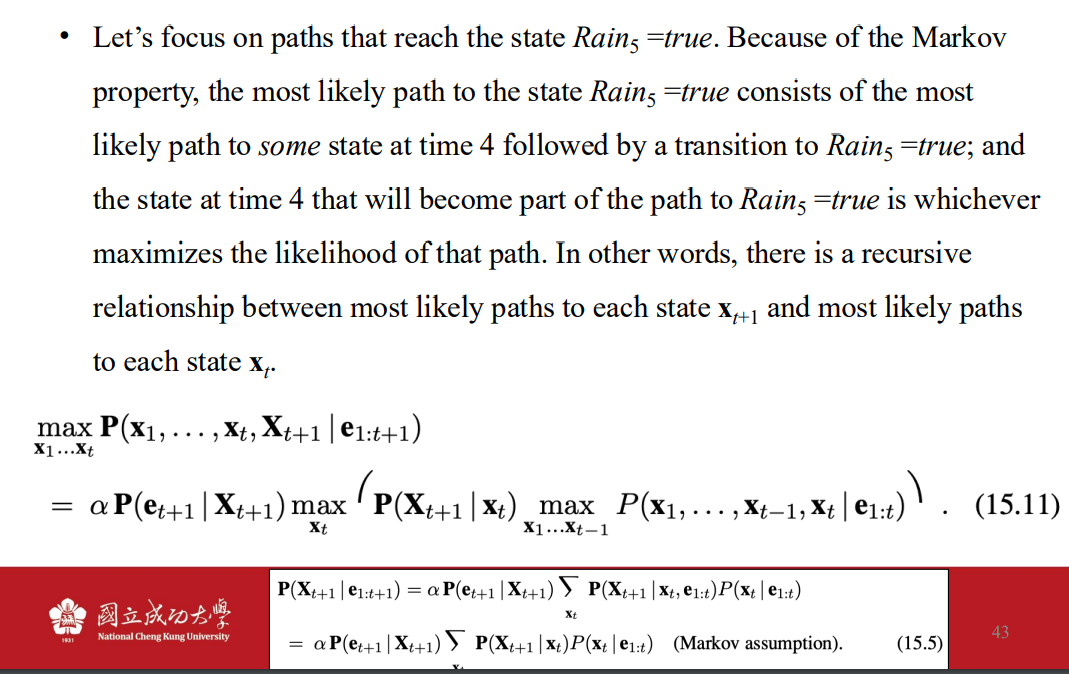
- 基本上就是說明上面會對的核心思路是什麼
跟forward 的差別就只是message的不同
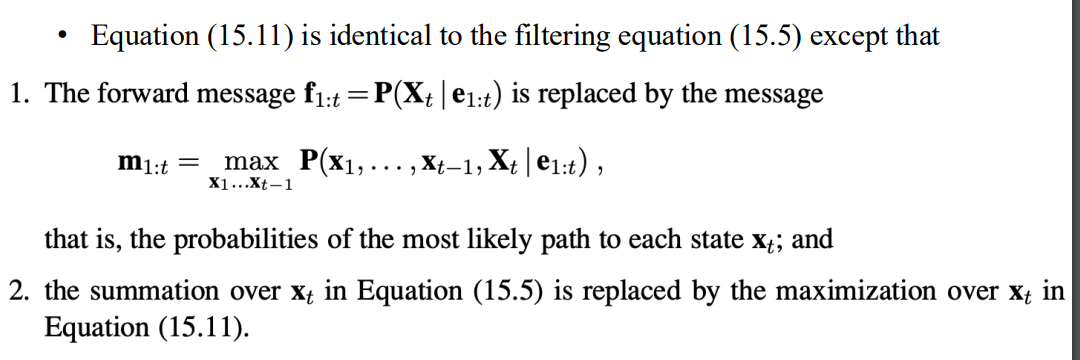
- 形式是類似的
- 所以本質上就是filtering
- 形式是類似的
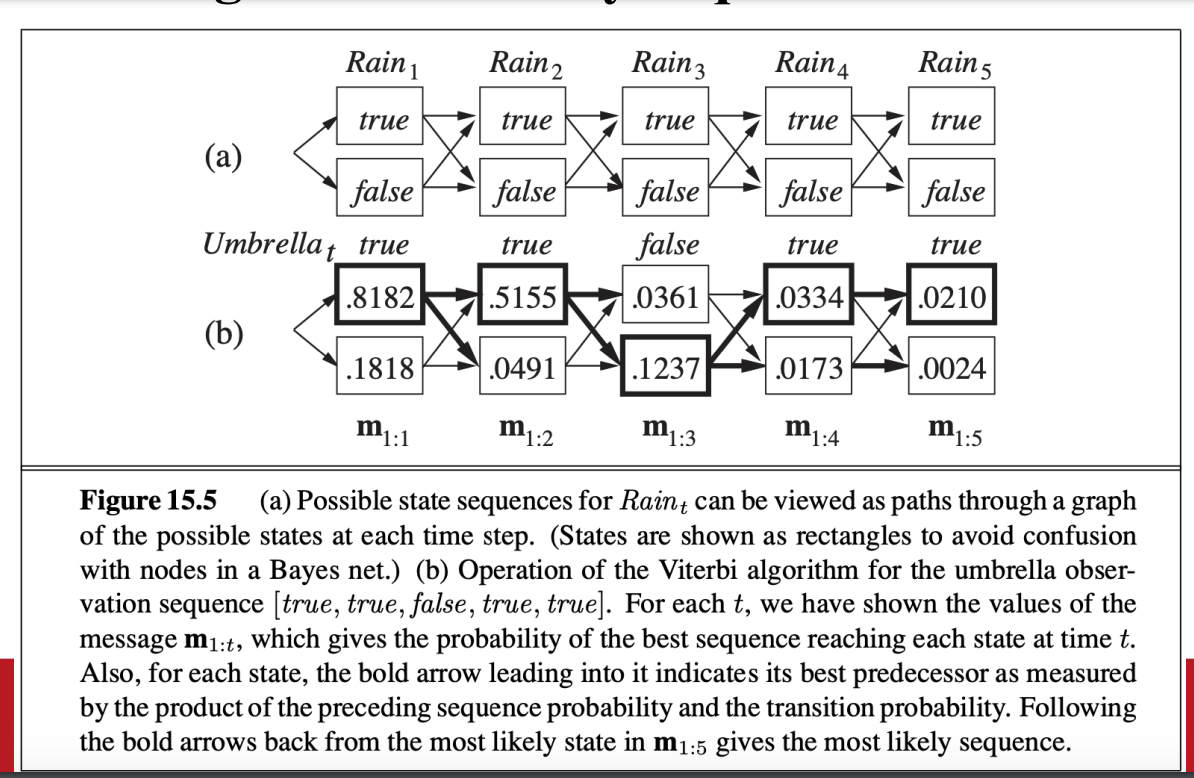
Viterbi algorithm
- 因為message的差別 跟filtering的時間複雜度一樣 但空間複雜度不同
Hidden Markov Models
- intro HMM
- 解決離散問題
HMM example: Localization
吸塵器的例子
- transition matrix的大小
- transition matrix的大小
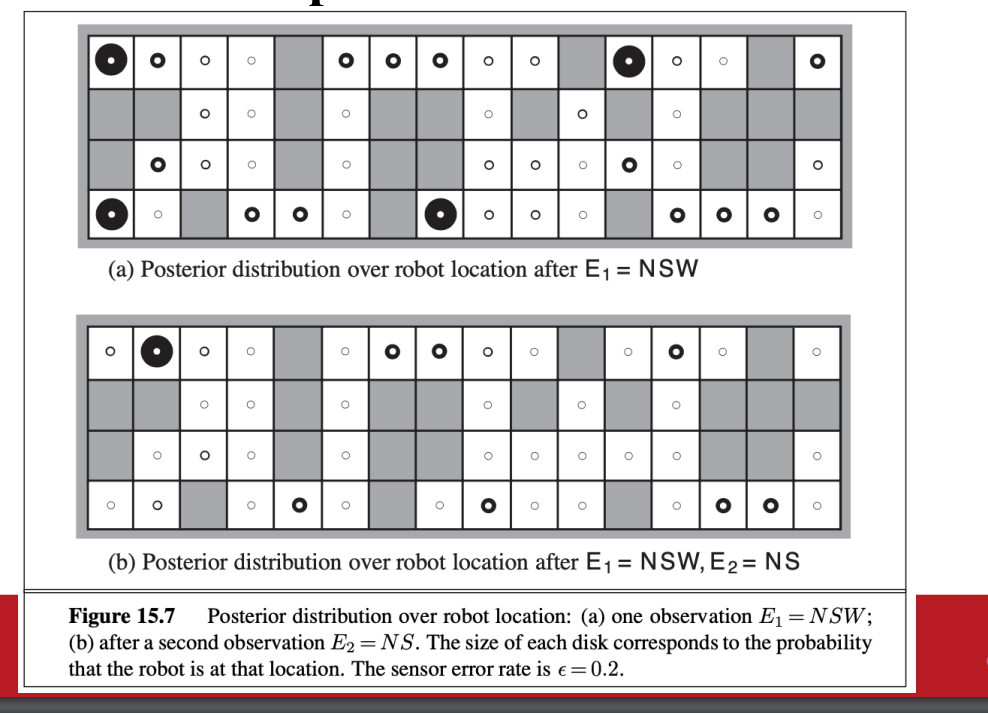
為收集數據建立機率分佈模型

用sommthing 知道某個時間agent在哪裡 用viterbit algorithm 知道最有可能的路徑
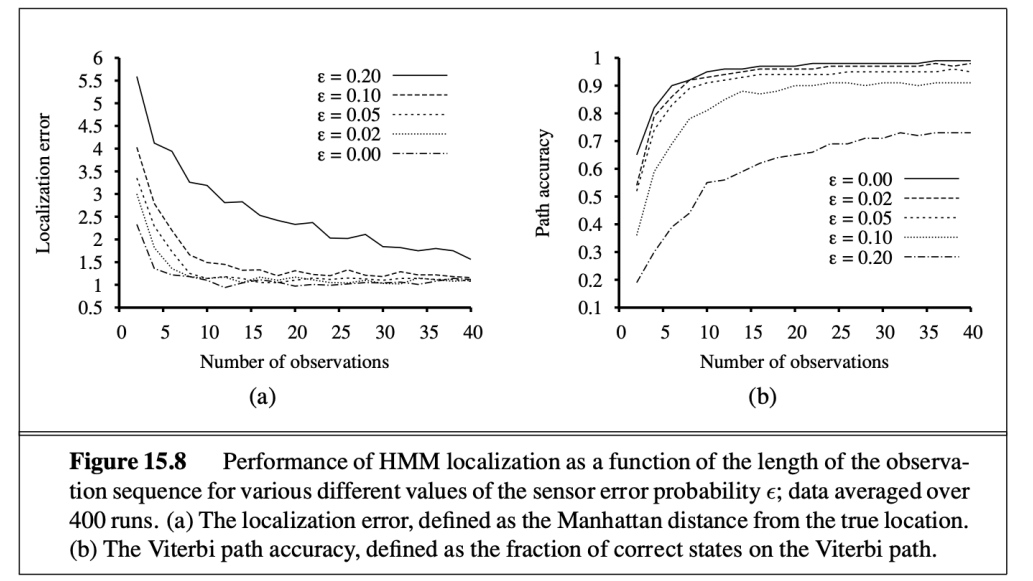
廣泛的說 能具備高等級的定位 以及準確路徑 即使是存在error的情況下
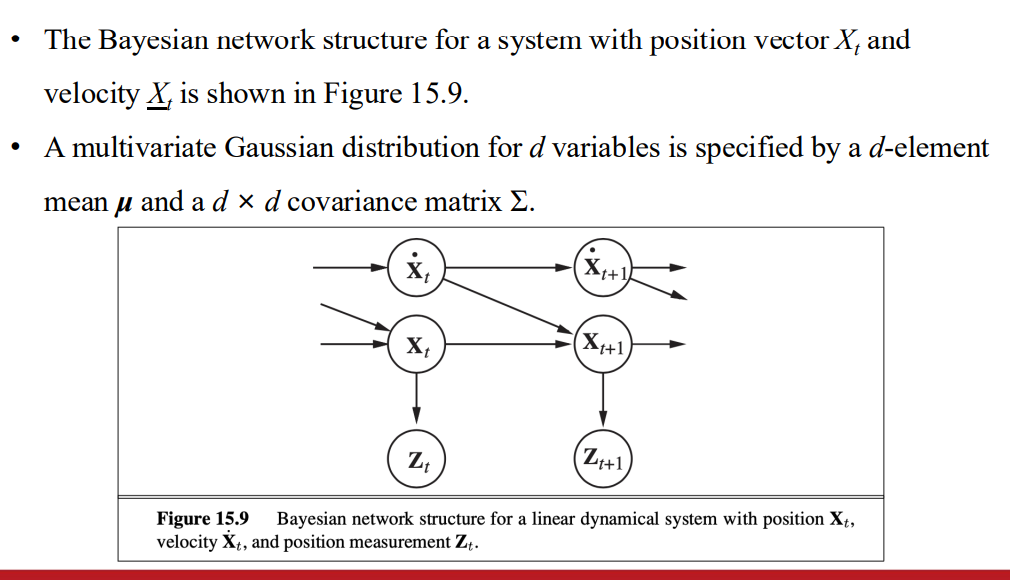
Kalman Filters
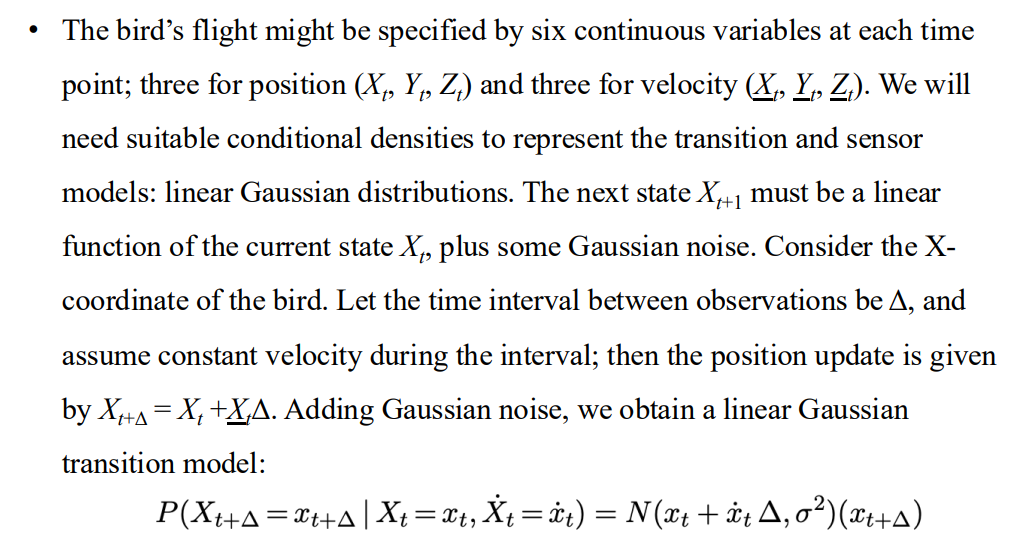
解決連續的問題
使用高斯建模
Bayesian network
Updating Gaussian distributions
線性高斯之間 運算的封閉性
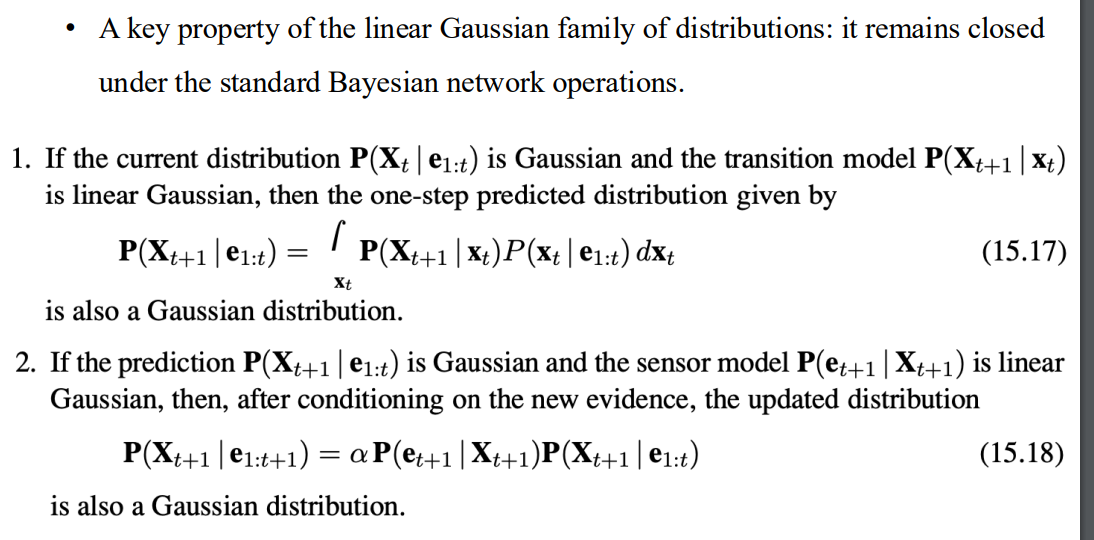
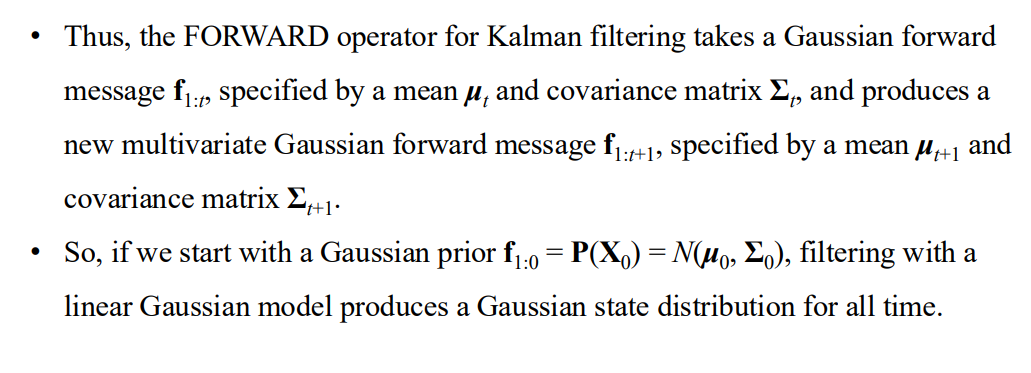
寫成forward的形式
A simple one-dimensional example
一維的例子

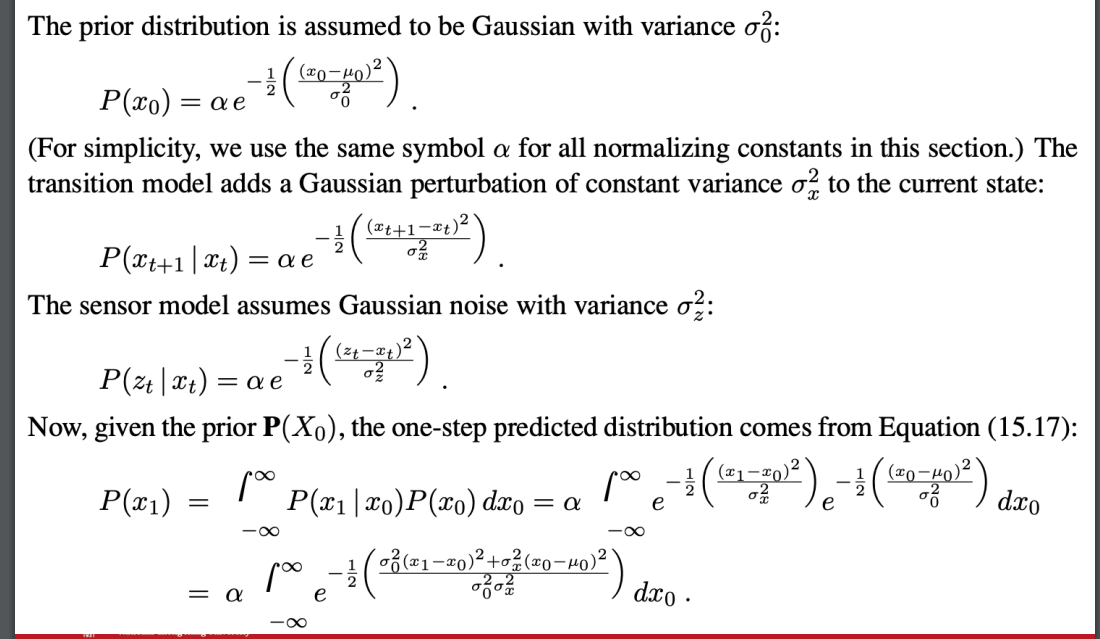
二次方程式能夠配方 因此補正項會獨立出來
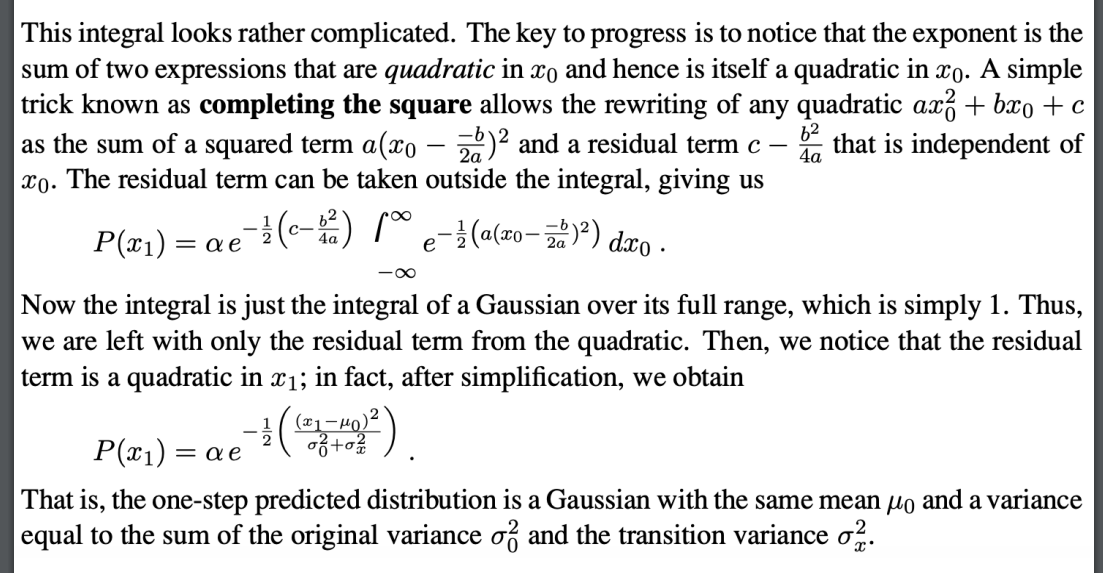
- 配方項則是e從負無限積到正無限 相當於1
Bayer’s rule
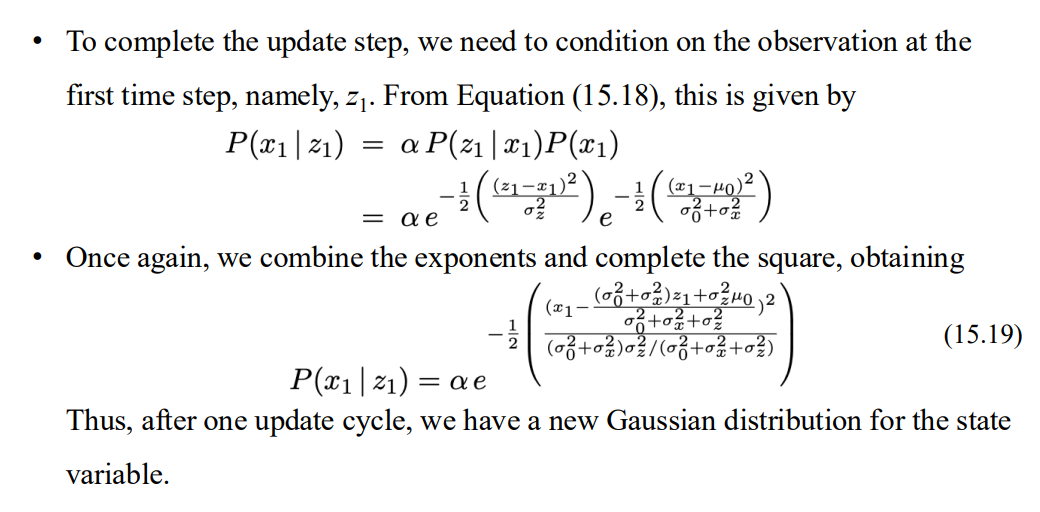
- 得出狀態的更新結果
結論
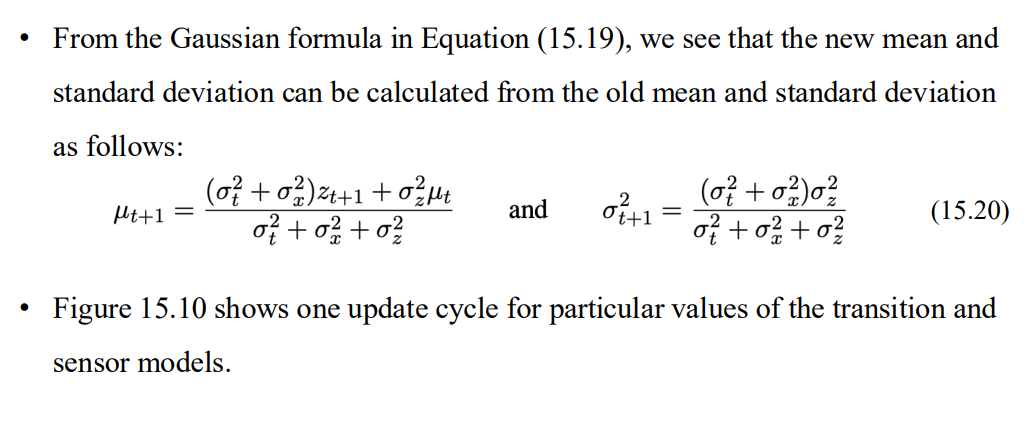
更新解釋
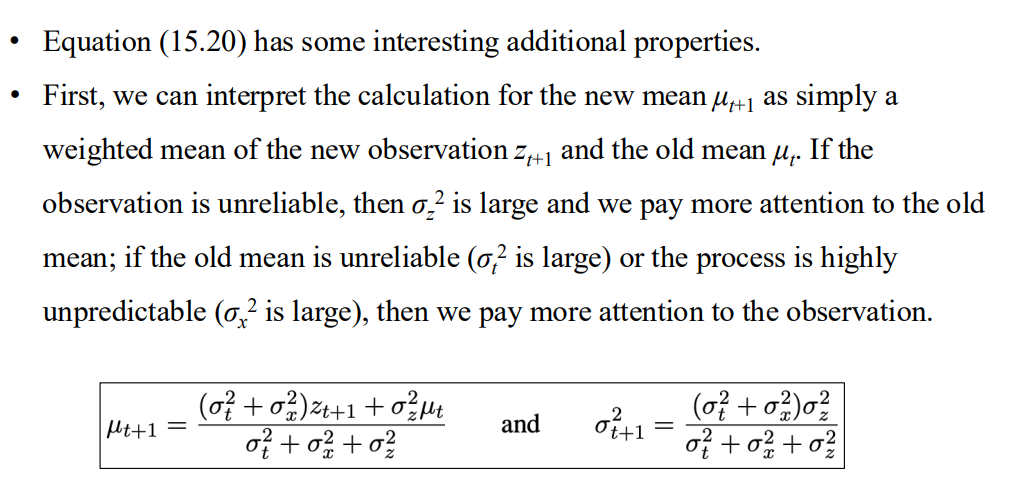
- 平均值的更新 受到不確定性影響(變異數)
: 過去平均的不確定性 : 轉移過程的不確定性 : 觀察的不確定性 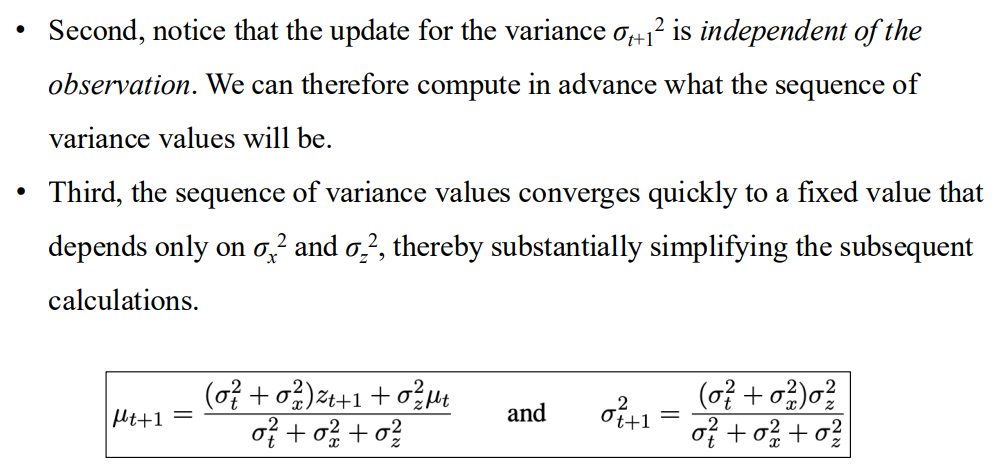
- 方差的更新和 觀測值獨立 => 一種固定模式 可以提早計算
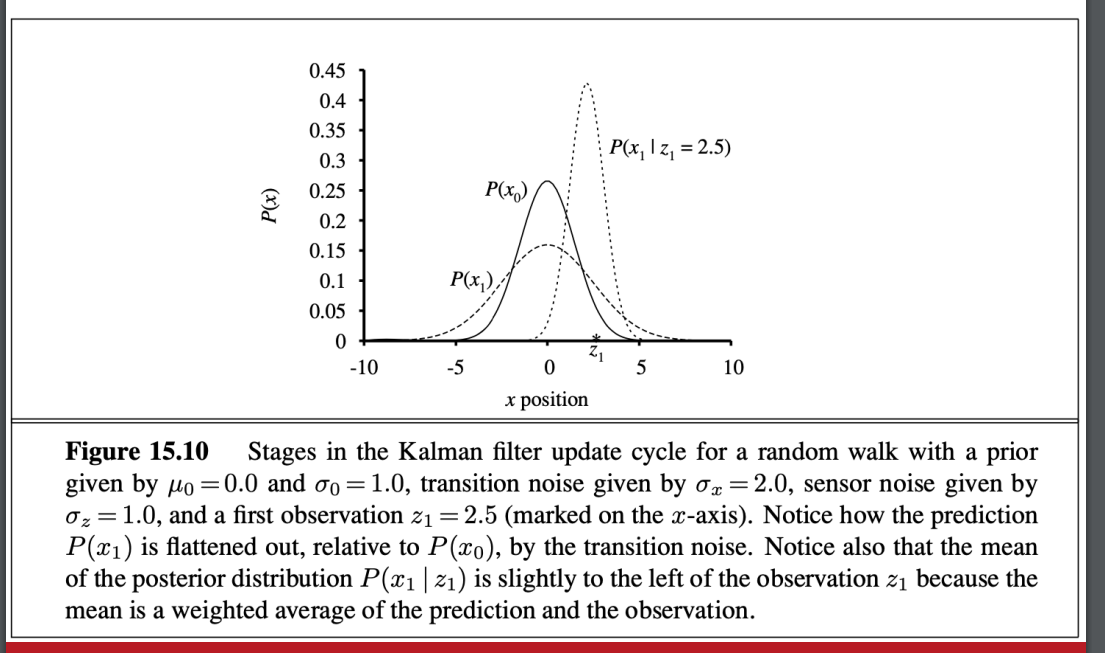
- 方差會收斂 => 穩定衰減到固定值
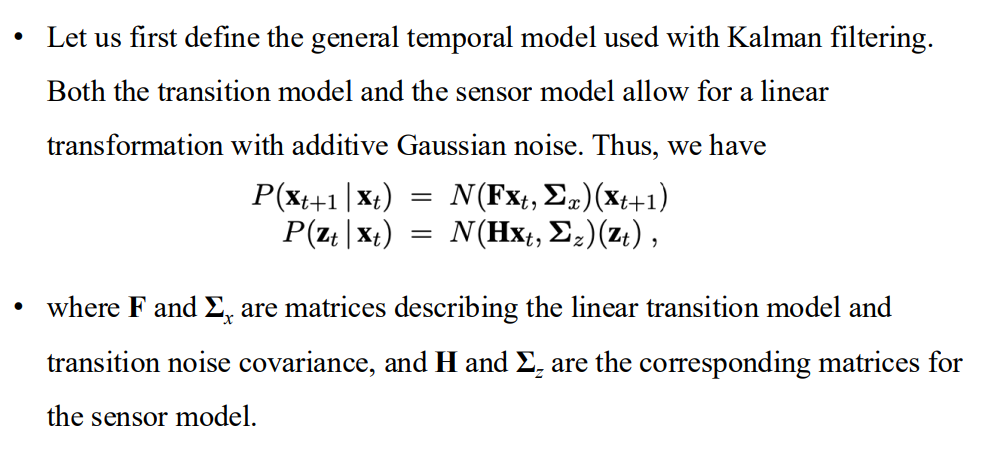
The general case
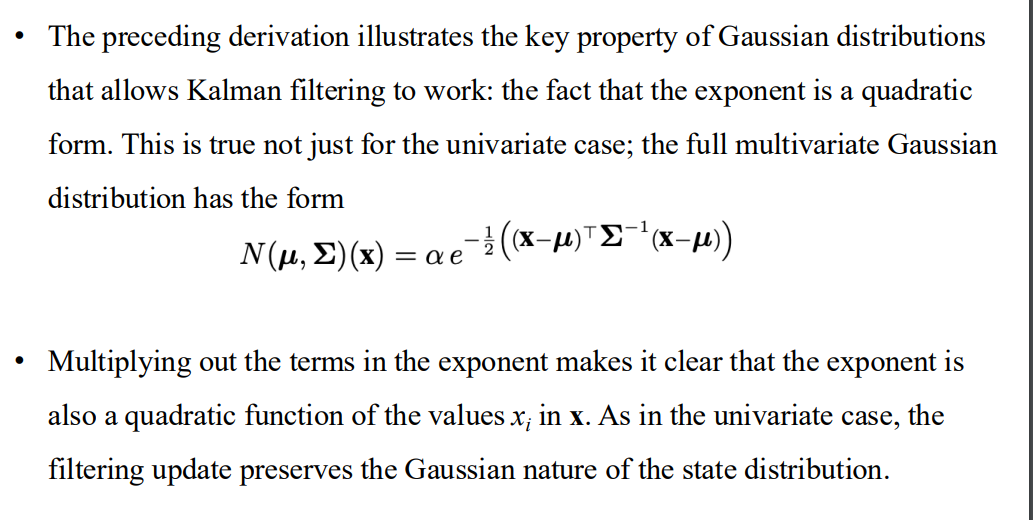
對多元素向量 也是同理
定義transition model and sensor model

- 如何更新 mean
- K 代表要如何考慮觀測值的影響 (置信度 高or低)
例子

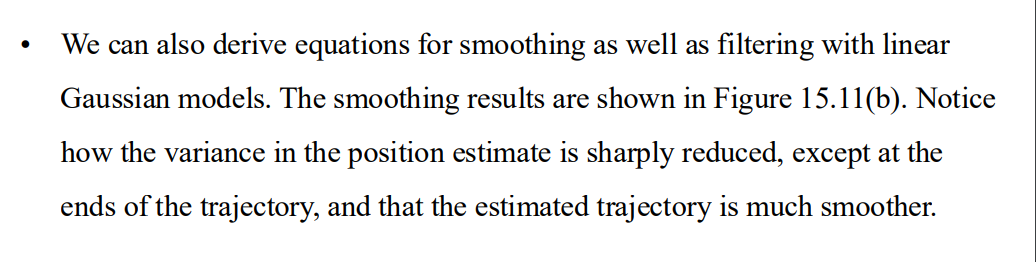
- smoothing的公式 也可以推導
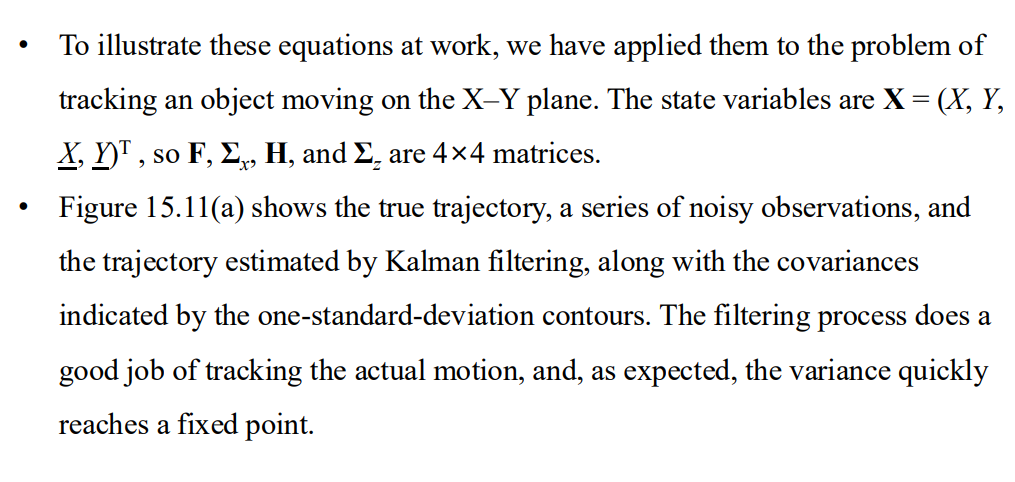
Applicability of Kalman filtering
- 應用範圍 任何連續的都可以吧

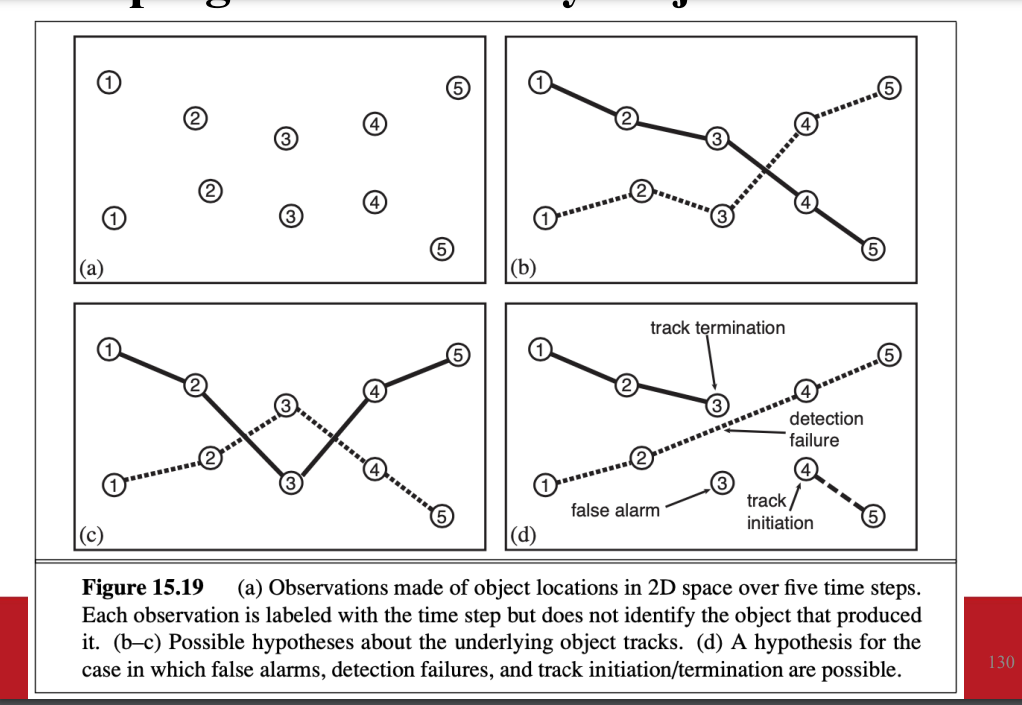
Keeping Track of Many Objects
多物體給出的觀察
- 不確定性:我們無法確定每條觀測數據是由哪個物體產生的。
- 可能性增加:每個觀測值都可能來自於任意一個物體,導致需要考慮多種數據分配情況。
空難的例子
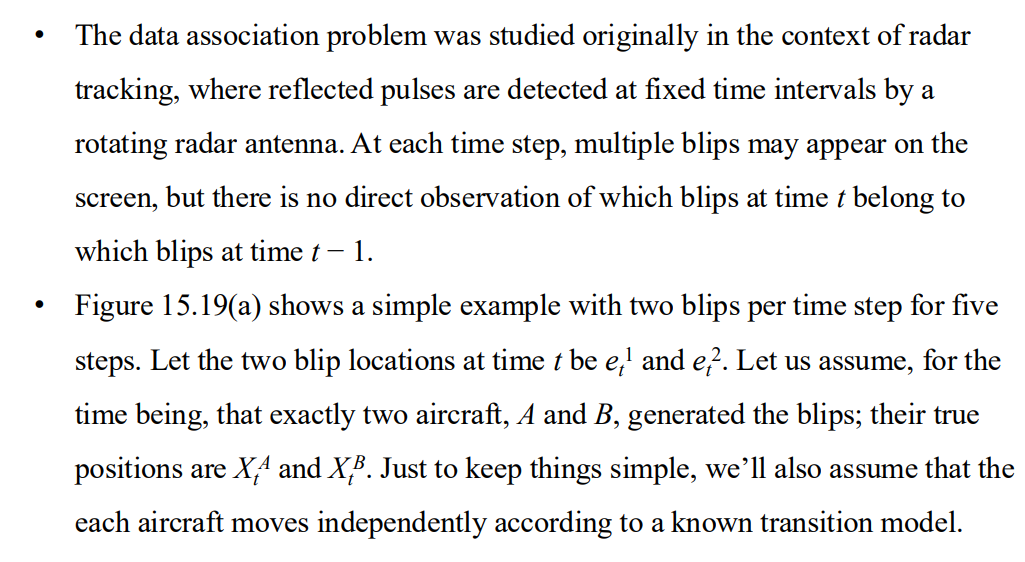
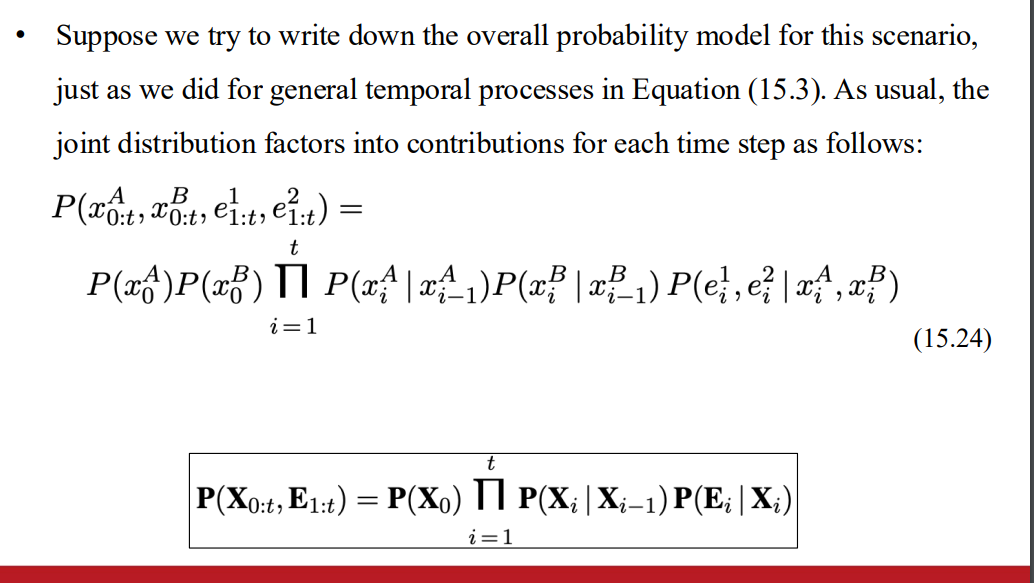
- 整理形式後
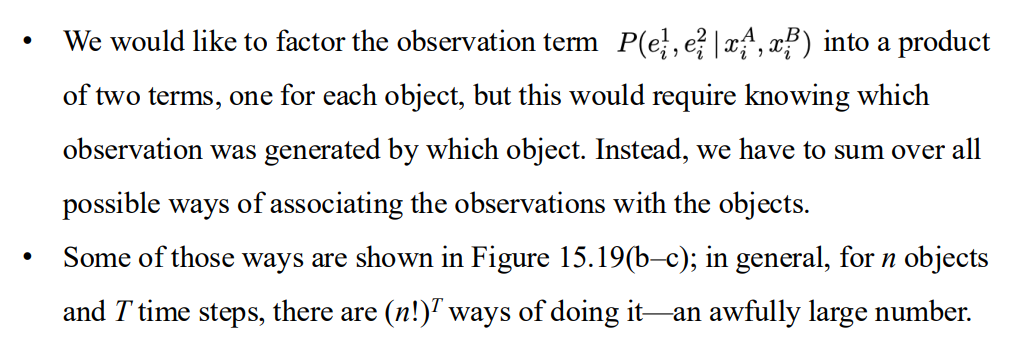
無法分辨觀測來源的話 問題會極度複雜
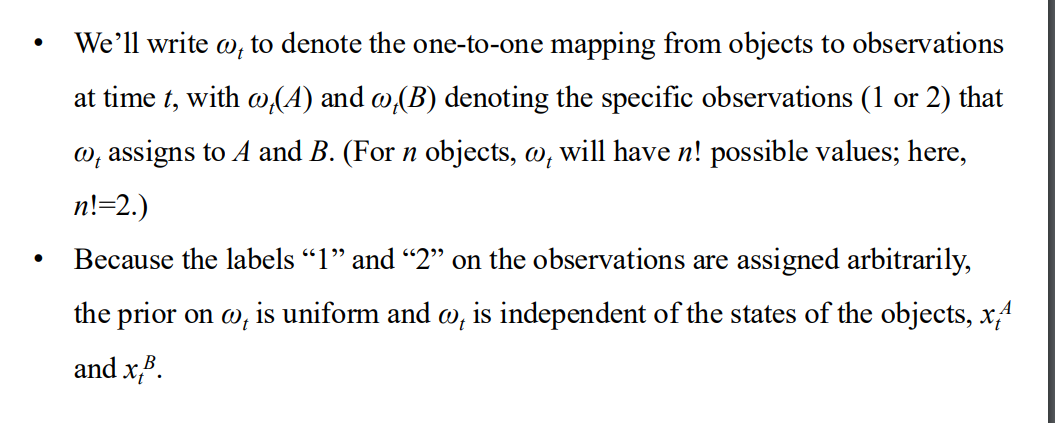
- 一對一映射 來簡化問題

- 簡化
- 一對一映射 來簡化問題
對這個問題 可惜還沒有有效的算法可以解決
估計方法
- 每個時間戳 選一個最好的
- nearest-neighbor filter
- 最大化 joint probaility
- Hungarian algorithm
- n! 種選擇

- particle filtering
- 維護很大的 可能選擇的集合
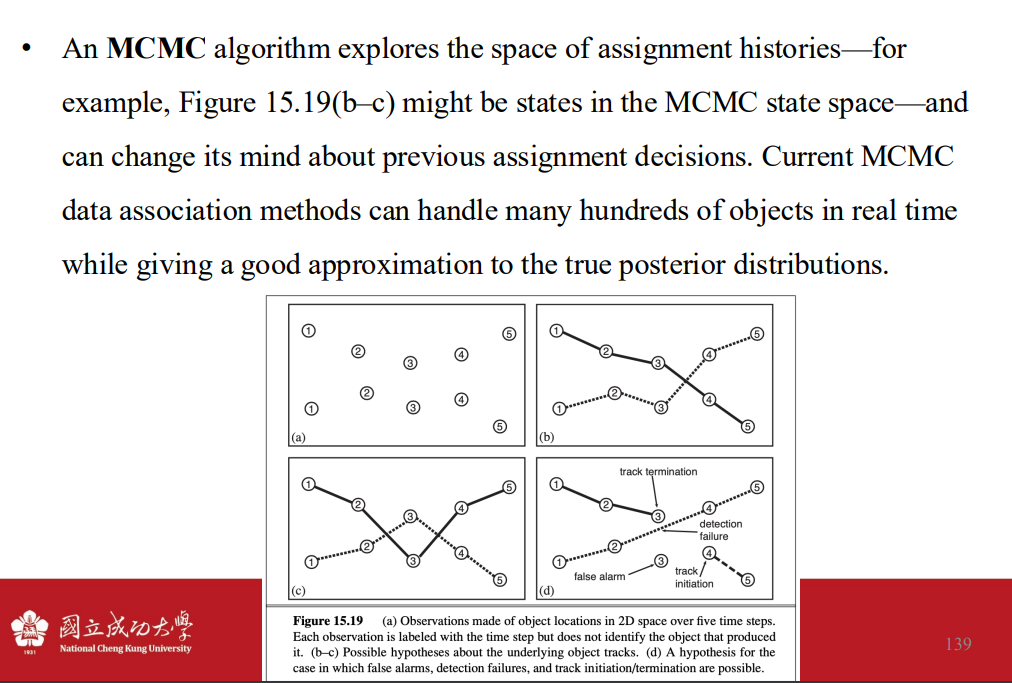
- MCMC (Markov chain Monte Carlo)
- 探索分配的歷史空間 隨機抽樣這些可能的分配
- 而且可以在探索中隨機轉移分配狀態
Chapter 14 Probabilistic Reasoning over Time
https://z-hwa.github.io/webHome/[object Object]/Introduction to Artificial Intelligence/Chapter-14-Probabilistic-Reasoning-over-Time/